
近些年高功率激光行业实现了迅猛发展。不同波长与各类光束整形技术的应用,推动该项技术高速迭代。为适配市场需求,BeamWatch非接触式光斑分析仪也在持续迭代升级。
本文介绍 BeamWatch 各类测量方式,验证各项测量精度,并针对不同光路配置给出适配测量方案的选型参考,旨在解答业界针对瑞利散射光束轮廓测量系统精度与性能的各类疑问。

D4σ (Moving Slit)
BeamWatch 初代符合 ISO 规范的光束宽度测量方案采用基于 1/e² 阈值的测量法,该原理和 ISO/TR 11146-3:2021 (E) 第 4.4 章节记述的狭缝扫描法原理相近。该测量方法的详细说明见文献 ,该文献同时对比了瑞利散射法、相机成像法与狭缝扫描法三组实测数据。
D4σ (Moving Slit) 方案对高斯光束、平顶光束(含杂波工况)测量结果稳定可靠,但在测量空心光束、双环芯光束等特殊非高斯光束时,易测得偏小的束腰直径。随着各类异形光束在行业内普及,尤其在激光焊接、增材制造领域大量落地应用,需要⼀种替代D4σ⽅法。
D4σ (Iterative)
D4σ (Iterative) 光束宽度算法采用二阶矩算法,在计算光束焦散曲线前先逐一算出各一维光束轮廓宽度。该算法针对偏离高斯分布的光束轮廓测量效果更优,但抗噪性能偏弱,在距离束腰较远的光束轮廓测量中噪声影响尤为突出。
为改善高噪敏感问题,算法启用感兴趣区域(ROI),剔除光束中心 6σ 以外的像素,实现逻辑参照ISO/TR 11146-3:2021 (E) 第 7.2 条款。
在 BeamWatch 设备中,光束轮廓宽度需先完成相机镜头与孔径带来的误差修正后再运算。σ 初值与初始感兴趣区域(ROI)由 1/e² 阈值法求解(狭缝测量相关依据为 ISO/TR 11146-3:2021 (E) 第 4.4 条款),后续每次迭代按以下步骤运行:
执行背景校正计算
● 依托当前感兴趣区域(ROI)与校正后像素光强,重新求解一阶矩、二阶矩
● 依据更新后的矩参数,重新计算 σ 与感兴趣区域(ROI)
● 循环迭代直至感兴趣区域(ROI)收敛,或是达到迭代次数上限。
背景校正
背景校正默认沿光束轮廓呈线性分布。该校正的实现思路为:完成背景校正后,最大限度降低感兴趣区域(ROI)边界附近噪声对二阶矩计算的干扰。
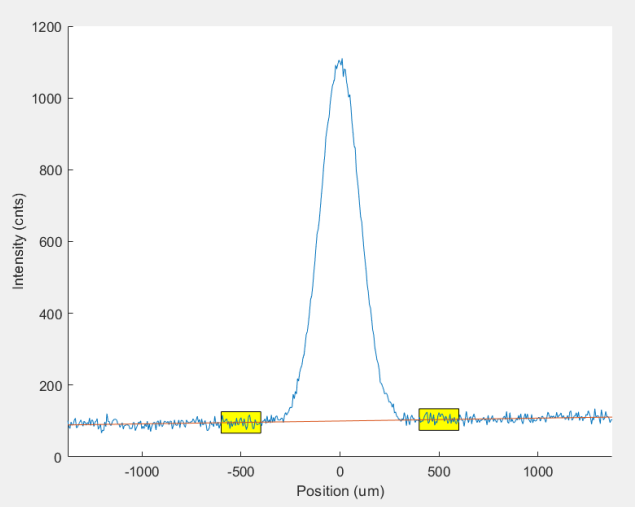
背景校正(为便于观察,斜率做放大处理)
需要注意:若光束尺寸过大或光束偏心,造成 ±6σ 感兴趣区域(ROI)超出有效成像画面,采用本算法会产生测量误差。该工况下算法无法完成合理的背景校正,同时缺少足够采样点,难以算出精准矩值。
感兴趣区域(ROI)验证
为核验感兴趣区域(ROI)选取位置是否合理,针对多种光束类型建立仿真模型,设置不同光束宽度与噪声等级。下图为各类光束仿真示意图,本次分析的信噪比(SNR)取值区间为 10dB~100dB。
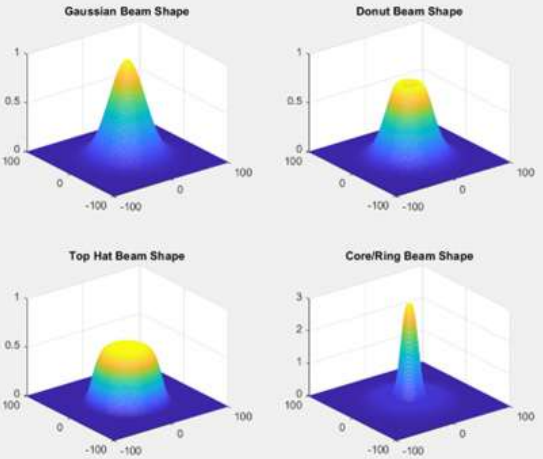
仿真光束形貌
确定感兴趣区域(ROI)的尺寸与位置后,计算区域内包含的光束功率占比,本次分析结果如下表所示。
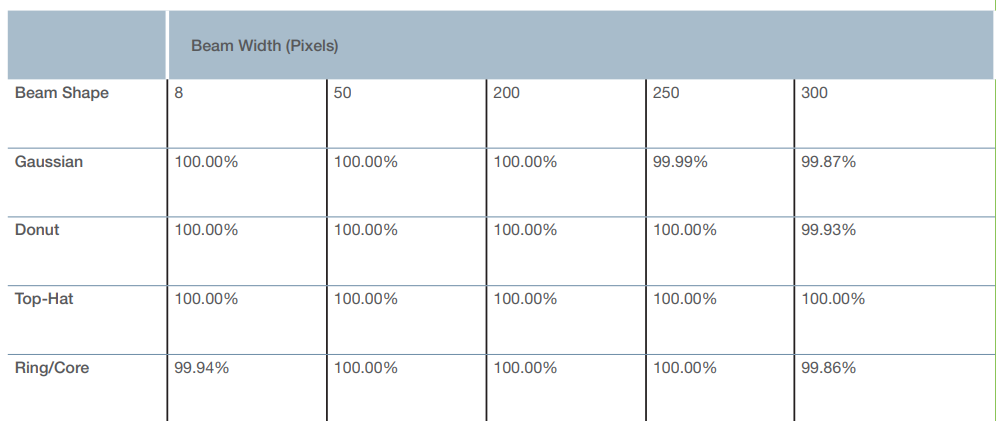
所有工况下感兴趣区域(ROI)内光束功率占比均高于 99%,由此判定该感兴趣区域选取方案合格。可以看出:当光束宽度逼近 512 pixels 相机分辨率极限时,区域内功率占比开始下降。
测量结果对比
为对比 D4σ (Moving Slit) 与 D4σ (Iterative) 两种算法的测量精度,对多种轮廓、不同束宽的光束模型开展仿真;叠加噪声并对光束轮廓做模糊处理,以此模拟 BeamWatch 光学系统成像效果。使用 BeamWatch 内置算法处理仿真数据,再将测算结果和光束原始参数做比对。
下文附图给出高斯光束、平顶光束、空心光束、环芯光束的系统误差与光束宽度重复性误差。选取 20、100 两组 SNR 数值,用于呈现最具代表性的测量工况。
注:本研究原始实测数据取自客户现场 BeamWatch 设备采集的真实工况;出于供需双方信息保密要求,本报告采用仿真数据编写,仿真结果与实测数据具备高度相关性。
高斯光束
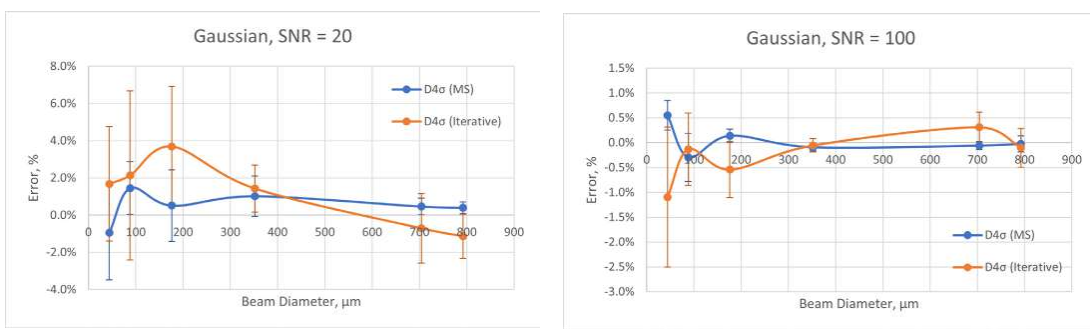
高斯光束束宽测量误差随光束宽度变化曲线
平顶光束
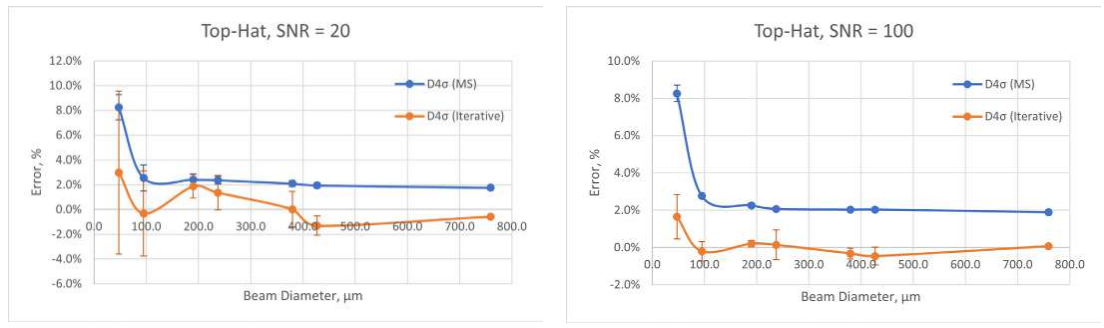
平顶光束束宽测量误差随光束宽度变化曲线
空心光束
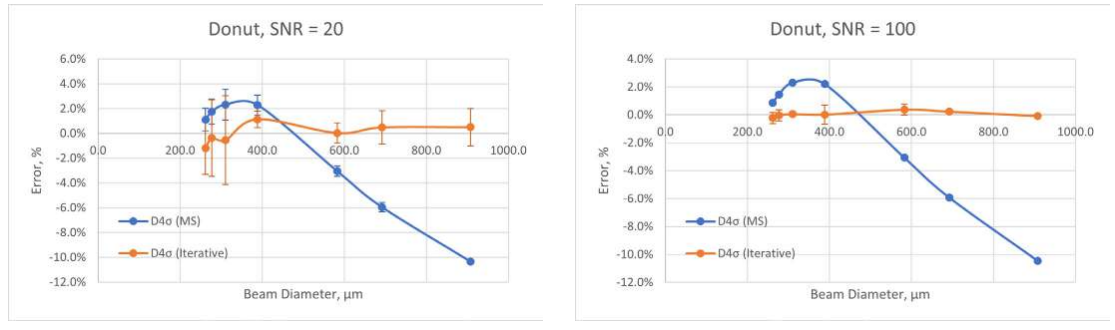
空心光束束宽测量误差随光束宽度变化曲线
环芯光束
环芯光束按照芯部功率占总光束功率的百分比开展研究。芯部功率占比为 0% 时,光束为空心光束;反之,芯部功率占比 100% 时,光束变为高斯光束或平顶光束。
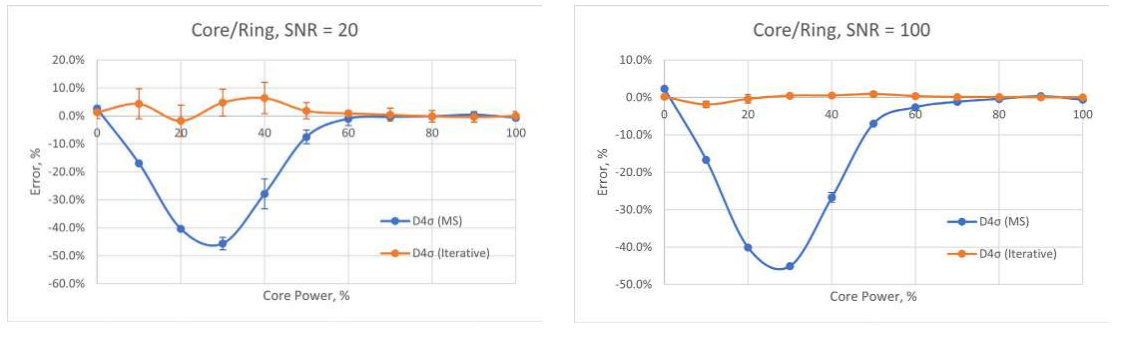
束宽测量误差随芯部功率占比变化曲线
束腰位置
束宽测量算法会造成束腰定位出现偏差。D4σ (Iterative) 算法的定义决定其在焦点前后生成对称焦散曲线,而 D4σ (Moving Slit) 算法生成的焦散曲线可为非对称形态。
对称焦散曲线对应的束腰定位精度更高,因此在开展束腰位置与焦移相关测试时优先选用 D4σ (Iterative) 算法。
结论
D4σ (Iterative) 算法在测量精度与重复性方面具备多项优势,但同时存在不足之处。随着背景噪声升高,感兴趣区域(ROI)的选取效果变差,噪声过大时将无法拟合求解焦散曲线。光束尺寸偏大(尤其远离束腰位置的光束轮廓),在 ±6σ 范围逼近相机分辨率上限时,测量精度同样下降。此外,迭代式感兴趣区域运算会增加处理耗时,降低测量速率。
需结合实际测量工况选择精度最优的算法:
● D4σ (Iterative) 适用场景
1、光束轮廓明显偏离标准高斯、平顶分布
2、图像信噪比(SNR)优异
3、需要精准获取束腰位置与焦移数据
● D4σ (Moving Slit) 适用场景
1、光束趋近高斯或平顶分布
2、图像背景噪声偏大
3、光束口径偏大
除此之外,若项目已有既定合格判定标准、或对测量速率有要求,优先选用 D4σ (Moving Slit)。
D4σ (Moving Slit) 与 D4σ (Iterative) 两种束宽算法均为合规可行的测量方案,二者分别对应 ISO 标准相关条款;当画面可观测足够瑞利长度时,BeamWatch 软件可生成符合 ISO 规范的标识。借助 BeamWatch,用户可在更多光束类型与测试环境下完成高精度测量。
