
为何基于相机的光束轮廓分析至关重要
高精度激光加工已成为汽车制造到微电子制造等行业的关键制造工具。要在这些不同应用中充分发挥激光加工的优势,通常需要保持稳定的光源输出。这意味着需要稳定的激光功率,且往往还需稳定功率分布与光束轮廓。
基于相机的系统常用于高精度测量激光光束轮廓与功率分布。这类仪器最初采用CCD(电荷耦合器件)传感器。过去几年,CCD 已基本退出市场,被CMOS(互补金属氧化物半导体)探测器取代。
CMOS 传感器优势
CMOS 传感器占据市场主导地位,因其相比 CCD 具备四大核心优势:
● 更快读取速度:CMOS传感器可以更快地生成图像,因为每个像素都是同时读取的。
● 成本更低:CMOS探测器采用与生产逻辑芯片和存储芯片相同的低成本半导体制造工艺制造。
● 片上集成:CMOS传感器允许将信号处理、放大器和其他功能直接集成到传感器芯片上,从而实现更紧凑、更高效的设计。
● 无拖影:拖影(图像中的垂直条纹)出现在CCD传感器中,是因为在读出过程中,部分电荷沿垂直列向下转移时会泄漏到相邻像素。但CMOS传感器完全不存在这种现象,因为每个像素都是独立读取的,不存在像素间的电荷转移。
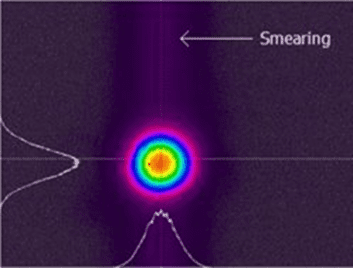
近红外波长下CCD光束分析仪的拖尾效应
CMOS传感器局限性
尽管 CMOS 优势显著,但在 近红外(NIR) 波段测量时存在固有局限:光晕(Blooming)。这意味着激光束在探测器上扩散,这可能会导致光束宽度和强度分布测量出现误差。
近红外波段会出现光晕现象,因为这些较长波长的光不易被硅吸收。这意味着红外光可以穿透到探测器内部,器件背面的反射光会进入周围的像素。虽然CCD也是由硅制成的,但其结构相对容易避免光晕现象。然而,CMOS传感器则难以做到这一点,因为控制每个像素的晶体管位于探测器上方的一层。所有这些复杂的3D结构和覆盖的电路都使得在探测器内部管理电荷流动和实现有效的光晕校正机制变得更加困难。
提高CMOS光束轮廓分析精度的解决方案
Ophir 通过背照式 CMOS解决近红外光晕问题,CMOS传感器通常采用正面照明。在这种照明方式中,入射光需要穿过多层晶体管和线路才能到达光电二极管结构。但这种结构会降低光收集效率,尤其是在近红外波段。
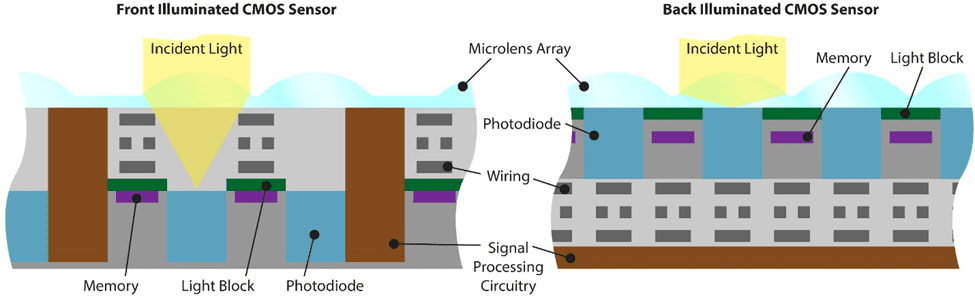
标准 CMOS(左)与背照式 CMOS(右)对比
在背照式照明中,入射光直接照射到光电二极管上。这消除了阴影效应,提高了灵敏度,并最大限度地减少了光晕。其他创新之处包括将信号处理层和感光层分离,从而使两者能够独立优化。这些进步显著提高了近红外光束轮廓分析的精度,同时还提高了整体性能并降低了噪声。
产品阵容(搭配 BeamGage 软件)
● SP204S:1/1.8" 传感器,测量范围27 µm–5.6 mm光束。
● SP402S:1.1" 大面阵,测量范围27 µm–12 mm光束。
两款相机均配备BeamGage软件,界面直观、功能强大,具备全面分析能力。

测量小直径光束
测量直径小于约 100 µm 的小型近红外聚焦光斑时,除了背面照明外,还需要采取其他措施才能获得极高的绝对精度。为了解决这个问题,开发了一种名为“光晕校正”的独特功能。这项技术应用于的SP932U 光束分析仪中,能够精确测量小至 35 µm 的聚焦光束直径。
这种光晕校正实际上是一种校准方法。具体来说,在产品开发过程中,对SP932U中使用的传感器进行了详尽的测试,以确定适用于所有光束尺寸和波长的正确标准。在此基础上,开发了校准方法和计算算法,用于校正传感器产生的原始数据。
将特制的照明图案投射到探测器上,以绘制每个传感器的光晕特性图。然后,利用所得数据微调轮廓仪软件中嵌入的校正算法。这确保了光束轮廓仪能够在各种波长、光束尺寸和强度下提供精确的测量结果。
虽然SP932U具备光晕校正功能,能够测量从大光束到聚焦光束的各种近红外光束,但通常会降低测量速率并延长曝光时间。因此,如果不需要测量直径小于100 µm的近红外光束,或者仅使用可见光或紫外波长的激光器(此时探测器光晕问题不大),则SP204S或SP402S是更好的选择。
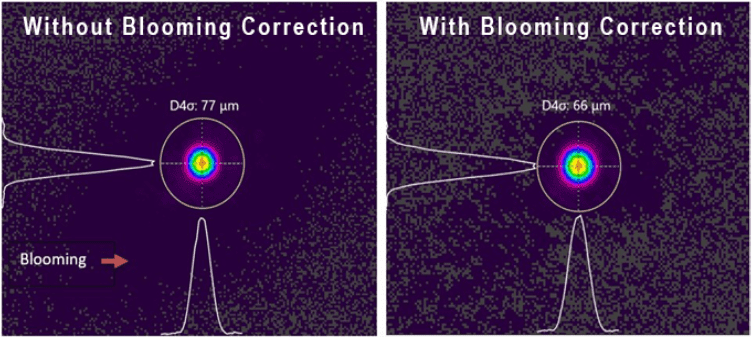
如果没有“光晕校正”,光束分析仪报告的光束直径
值不正确,为 77 µm;而有了“光晕校正”,它给出的正确值为 66 µm。
