

ISO/TS 15066《机器人和机器人设备——协作机器人》
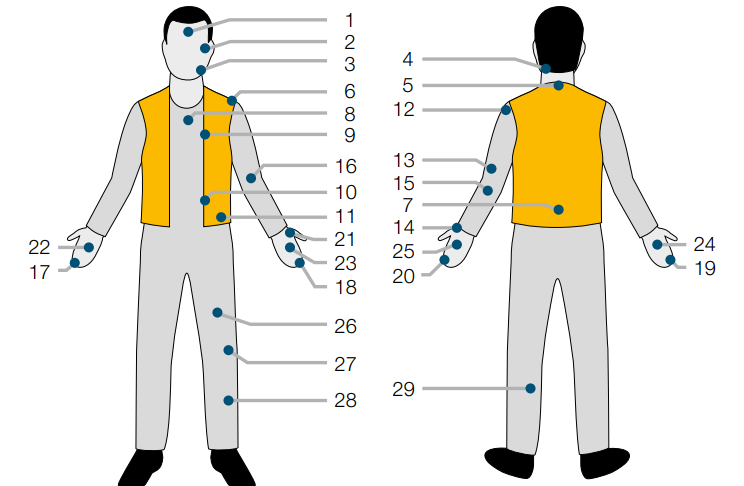
ISO/TS 15066规定了准静态和瞬态接触的允许力和压力值,并将人体分为29个区域,分别对应不同的力值。准静态接触是指缓慢且持续施加的力和压力(形变力和压缩力),而瞬态接触是指由瞬时碰撞产生的力和压力(冲击力和惯性力)。
协作机器人碰撞力测量系统CoboSafe
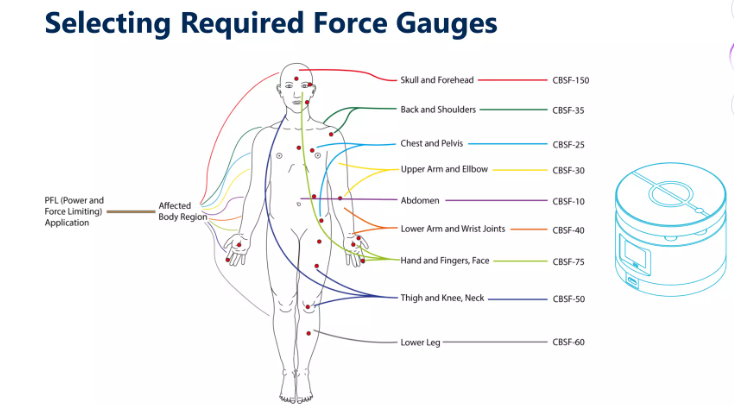
CoboSafe 是一款用于测量人机协作中碰撞和夹持等力的测量系统,通过弹簧常数来定义其生物逼真度特性(例如身体阻力),得到九个弹簧常数,然后根据ISO/TS 15066(对应国标GB/T 36008-2018)、 ISO 10218-2标准对碰撞和夹伤风险进行评估。弹簧常数 (K2) 与其中一个附加阻尼材料 (K1) 的组合允许根据以下标准配置生物力学特性:
| 身体部位 | 阻尼材料(Shore A,DGUV‑FB HM‑080) | 弹性常数(N/mm,ISO/TS 15066) |
|---|---|---|
| 头骨和前额 | 70 | 150 |
| 面部 | 75 | |
| 手部和手指 | ||
| 颈部 | 50 | |
| 下臂和腕关节 | 40 | |
| 胸部 | 25 | |
| 骨盆 | ||
| 小腿 | 30 | 60 |
| 大腿和膝部 | 50 | |
| 背部和肩部 | 35 | |
| 上臂和肘部关节 | 30 | |
| 腹部 | 10 | 10 |


")
主要包含三种型号:
• CBSF-Basic:配备 75N/mm 弹簧,可测量除头部以外的身体部位的冲击力。显示图表和数值。
• CBSF-XS:测量夹爪瞬态和准静态接触的冲击力。可通过侧面 LED 指示灯查看工作状态。
• CBSF:包含九种不同量程(10 至 150N/mm)的独立力传感器。每种身体部位均配备专用弹簧进行测量。
此外,CoboSafe-Scan、CoboSafe-Scan压力测量系统和专用分析软件CoboSafe-Vision可以分析压力分布情况。
技术规格
| 规格参数 | 测量范围 | 弹簧常数 | 高度 (mm) | 重量 (g) |
| CBSF - 10 | 20 N ... 300 N | 10 N/mm | 107 | 935 |
| CBSF - 25 | 20 N ... 500 N | 25 N/mm | 89 | 840 |
| CBSF - 30 | 20 N ... 400 N | 30 N/mm | 75,5 | 770 |
| CBSF - 35 | 20 N ... 500 N | 35 N/mm | 76 | 775 |
| CBSF - 40 | 20 N ... 500 N | 40 N/mm | 73,5 | 780 |
| CBSF - 50 | 20 N ... 500 N | 50 N/mm | 65 | 730 |
| CBSF - 60 | 20 N ... 500 N | 60 N/mm | 64 | 740 |
| CBSF - 75 | 20 N ... 500 N | 75 N/mm | 62 | 745 |
| CBSF - 150 | 20 N ... 500 N | 150 N/mm | 60 | 760 |
| 测量表面 | Ø 80 mm |
| 最大测量误差 | ± 3 % FS |
| 测量误差 | typ. ± 1 % FS |
| 采样率 | ≥ 1 kHz |
| 内存容量 | > 100 个单次测量值 |
| 供电电压 | DC 3.7 V (内置锂聚合物电池) |
| 电流消耗 | 500 mA |
| 接口 | USB/无线 |
| 温度范围 | +10 °C … +30 °C |
| 相对湿度 | 20 % … 90 % RH(无凝结) |
| 防护等级 | IP10 |
| CoboSafe-Scan | |
| 测量误差 | 典型值 ± 10 % 或更小(在 23 °C、65 % RH 下测量) |
| 温度范围 | +20 °C … +35 °C |
| 相对湿度 | 35% … ~ 80% RH |
| 测量范围 薄膜 LLW | 50 N/cm² … 250 N/cm² |
| 测量范围 薄膜宽度 | 250 N/cm² … 1000 N/cm² |
| CoboSafe-Tek | |||||
| 压力传感器类型 | 9500 | 5051 | 5151 | 5101 | 5027 |
| 压力范围 [N/cm²] | 827 | 242 | 242 | 242 | 345 |
| 测量表面 [mm x mm] | 70 x 70 | 56 x 56 | 165 x 165 | 112 x 12 | 28 x 28 |
| 每个传感器 cm² | 3,9 | 62,0 | 7,1 | 15,5 | 248,0 |
| 测量误差 | < 10 % | < 10 % | < 10 % | < 10 % | < 10 % |


